Robotic Metal Grinding Cell
User Interface Adjustment of Trajectory Simulator

Robotics Metal Grinding Cell
To meet the requirement of small volumes with large-variety in metal grinding or polishing applications, we launched the prototype of a robotics metal grinding cell in 2020. The whole system contained three main techniques: computer vision, force sensing and trajectory compensation. It could recognize kinds of workpieces for deciding production orders, detect variations of workpieces for adjusting trajectories, and record applied forces for optimizing production processes. I took responsibility for developing the trajectory adjustment system and designing the whole hardware. (video) (The Robot Report) (ITRI Today)
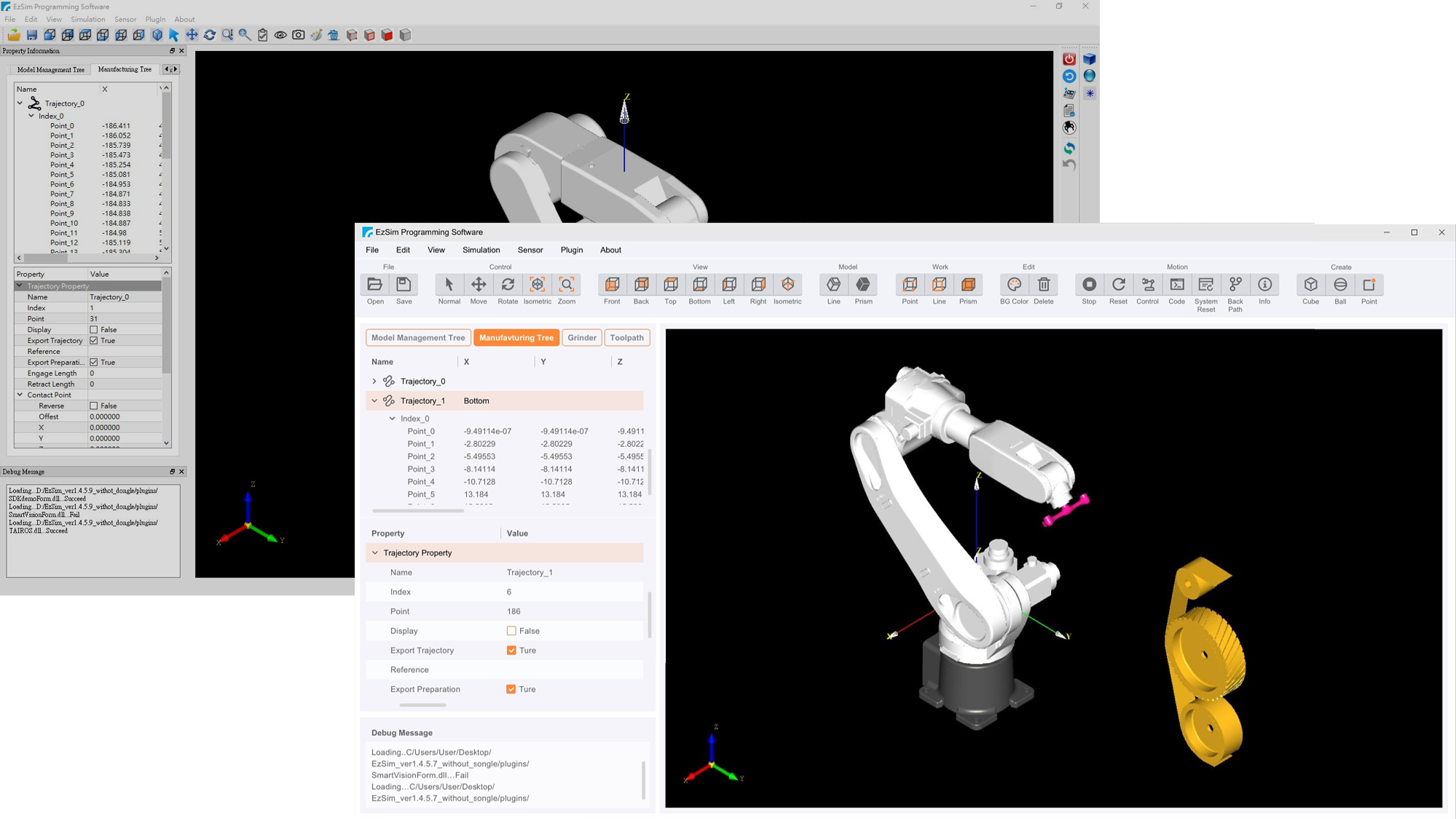
User Interface Adjustment of Trajectory Simulator
The function icons were redesigned and classified to strengthen the integrity and become more clear. The text labels were also added to make users understand more easily. Besides, the action sheets and the layout were modified for guiding attention more effectively.