Robotics Metal Grinding Cell
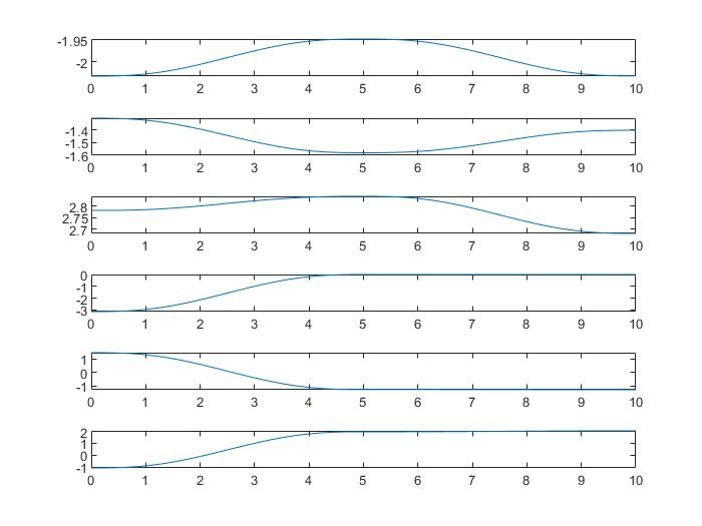
The goal of this project was to develop a computer program that can monitor a robot's pose as it moves through a trajectory passing through user defined way points and determine if it has reached a singular configuration. While the primary focus of this program was to monitor if the robot was at a singularity, additional functionality included the following: Inverse Kinematics, Trajectory Planning (quintic polynomials and spline interpolation), Joint Limit monitoring, and GUI Development